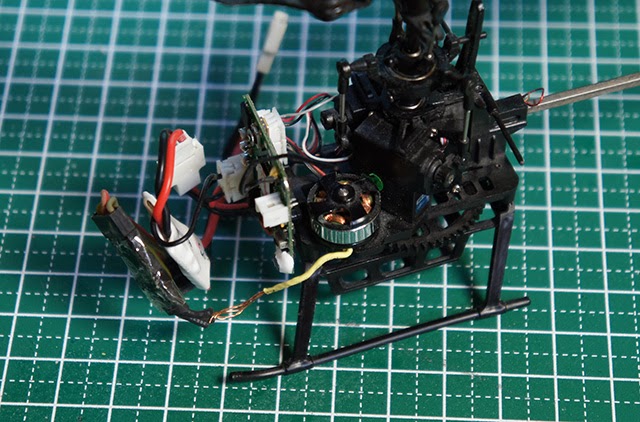
オリジナルから多少?(大幅に)変更しているV120D02Sですが、自分なりにかなり完成度は高いと思ってます。この状態で性能を把握しておきたいこともあり、いろいろなデータをとってみたいと思います。
2機所有しているのですが、オリジナルからの変更点は
共通項目としては、
1.バッテリーの2S化
2.テールダイレクトモーター駆動(ブラシレス)
を行ってます。
2機の違いはメインモーターが純正ブラシレスモーターとSPIN 8800kv フレームが純正モーター機はEXTREMEのカーボンフレーム、SPINモーター機は純正プラフレームです。
データをとる項目は
1.構成パーツの性能
モーター単体のKV値
搭載バッテリーの放電能力
ESCの最大回転数
サーボの動作角とPPM信号値
受信機のPPM出力特性
2.ヘリとしての性能
最大推力
最高ローター回転数
電流値
電圧値
スワッシュ動作量
ピッチ角による推力の変化
等です。
これらを計測して最適セッティングを模索しようと思います。
そのための道具立ては
ビジュアル的には
クランプ式電流計
テスター(電圧計として使用)
デジタルスケール(推力測定)
光学式ローター回転数計
を使ってヘリをスケール上に固定し、リアルタイムにこれをデジカメでビデオ録画するのが分かりやすいですが、
信頼性という意味から
上記にプラス
音響ソフトによる解析とインフライトデータロガーによるデータ取りも同時に行いたいと思います。
インフライトデータロガー(eagletree E-logger v4)は、4.5v以上で動作し100A、80V迄の電流と電圧、サーボの動作状況、モーター、ローターの回転数が同時に計測できます。しかも、計測タイミングは最高1/10秒間隔ですから、メーターに表れないピーク電流も計測できそうです。
本当は、この機材を積んで実際にフライトさせるのが一番ですが、450クラスでもかなりの重量増で機動性が失われるので、120クラスはちょっとしんどいです。
1回目は、手始めに受信機のスロットルチャンネルの出力特性を調べてみました。
1.受信機のスロットルチャンネルにオシロスコープを繋ぎ、プロポのスティックに対する信号の変化を見る
アウトプットは受信機の信号のPPM値です。プロポのスロットルカーブは0-100の直線です。
スティック中立で62%出力になってます。完全な直線ではなさそうです。
ちなみにピッチチャンネルでは1100-1500-1900μSの完全な直線でした。
2.データロガーでサーボ出力をモニターする
データロガーにスロットルチャンネルを繋ぎ、スティック変化に対する受信機出力をモニターしました。
スティックを動かして最後に中立で止めてます。
minが26,maxが198です。最後に直線状のところは131です。(単位は不明)
なので、(131-26)/(198-26)=61 (61%)ですからほぼオシロの結果とあってます。当たり前か?
次回はバッテリーの放電能力について調べたいと思います。